Visualizing Nao in RViz
Below are two sets of instructions, for using either:
A simulated robot (rcss3d_nao) - with the SimSpark simulator using the NaoSoccerSim package
A real NAO (nao_lola) - using the Nao Lola package
Select the appropriate tab.
These are instructions for visualizing a simulated robot.
Warning
Before continuing with this tutorial, make sure you have installed SimSpark, NaoSoccerSim, ROS2 Nao Package, as well as the packages for this project. If you haven’t yet, install them now.
In a terminal, start the simulation server:
rcsoccersim3d
In a new terminal, run the simulated player node:
ros2 run rcss3d_nao rcss3d_nao
Note
Simulated Nao publishes vision information as well as sensor information.
These are instructions for visualizing a real NAO.
Warning
Before continuing with this tutorial, make sure you have installed Nao Lola, as well as the packages for this project.
On the NAO, in a new terminal, start the nao_lola node:
ros2 run nao_lola nao_lola
Note
nao_lola only publishes sensor information, you must run your own nodes that publish to vision topics.
In a new terminal, start the nao_state_publisher:
ros2 launch nao_state_publisher nao_state_publisher_launch.py
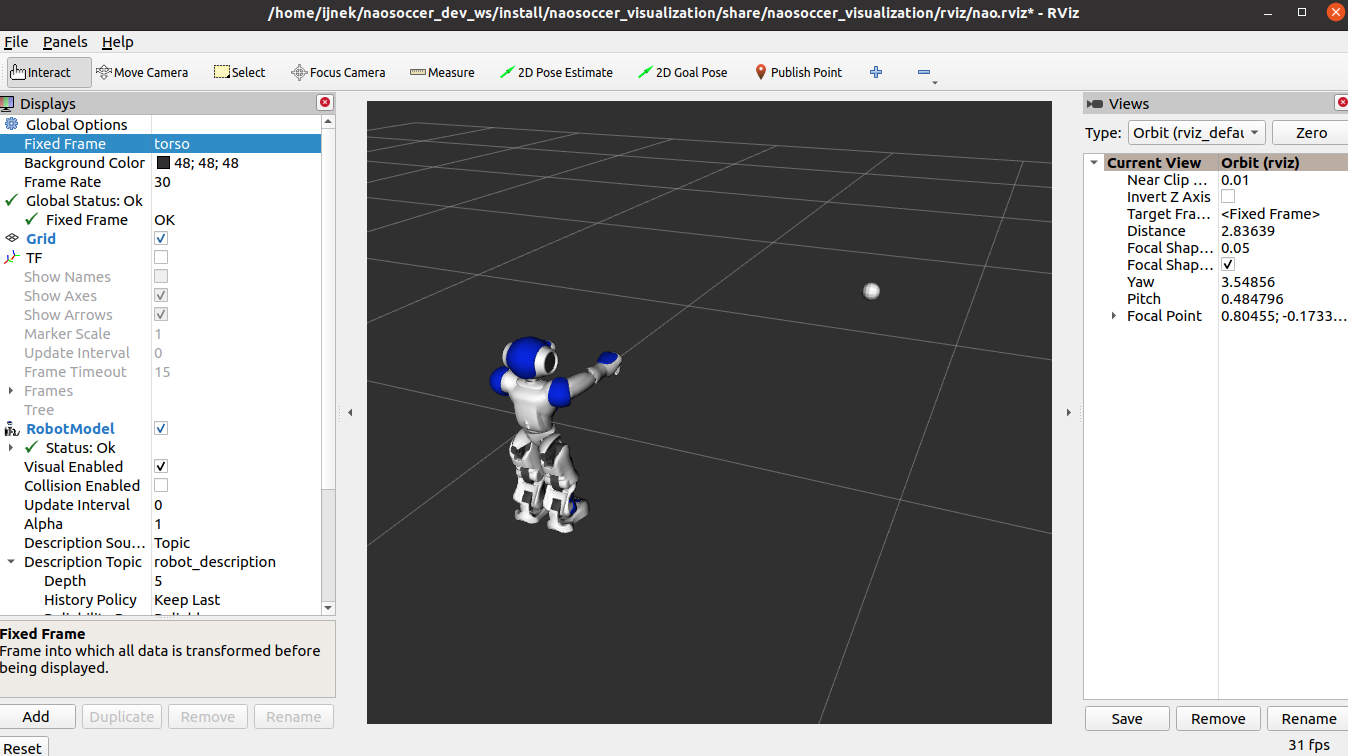
Finally, start rviz in a new terminal:
ros2 launch naosoccer_visualization_launch rviz_launch.py
Moving around in RViz, you should be able to see what the robot has observed.